- High-G, High-Speed IMU: Selecting and integrating a high-performance 9-axis IMU (Accelerometer + Gyroscope + Magnetometer) capable of withstanding extreme G-forces (impact shocks) and capturing high-speed swing data without saturation.
- Critical Sensor Orientation: The IMU’s placement and precise orientation on the PCB are paramount. The design must ensure the sensor’s axes are perfectly aligned with the bokken’s „edges“ and „flat“ to provide clean data for the software’s sensor fusion algorithms.
- Aggressive Power Management: Designing a battery-powered system that can last for weeks in standby but wake instantly on motion. This involves an ultra-low-power MCU and IMU, leveraging the IMU’s „wake-on-motion“ interrupt to keep the main processor in a deep sleep state.
- Compact Power Circuitry: Integrating a LiPo battery, a charging circuit (likely USB-C), and a Power Management IC (PMIC) onto the same spatially-constrained board, all while managing the heat generated during charging.
- Careful RF Layout: Meticulous layout of the RF section with proper ground planes, keep-outs, and impedance-controlled traces to maximize signal integrity and transmission range despite the challenging enclosure.
IoT Bokken Sword
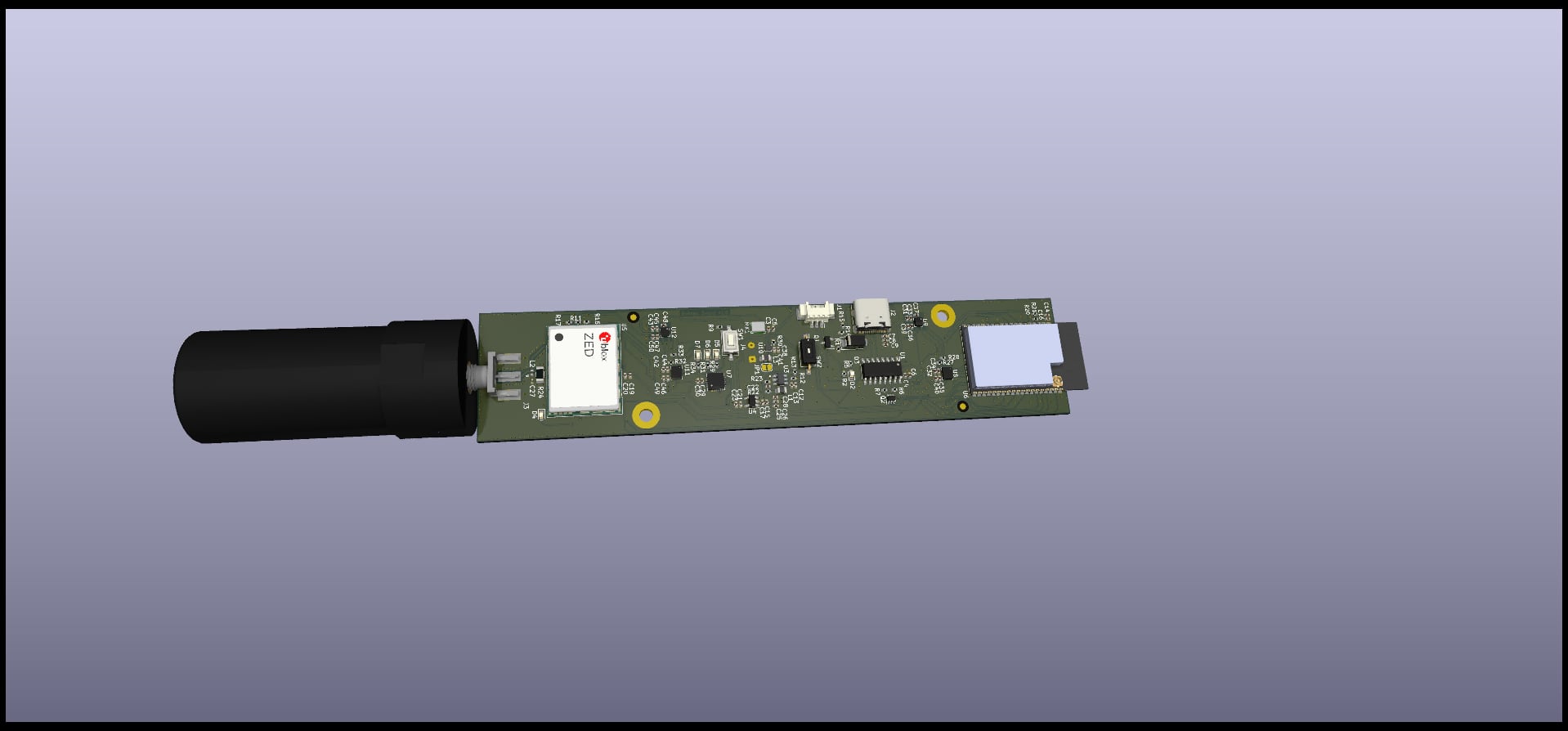
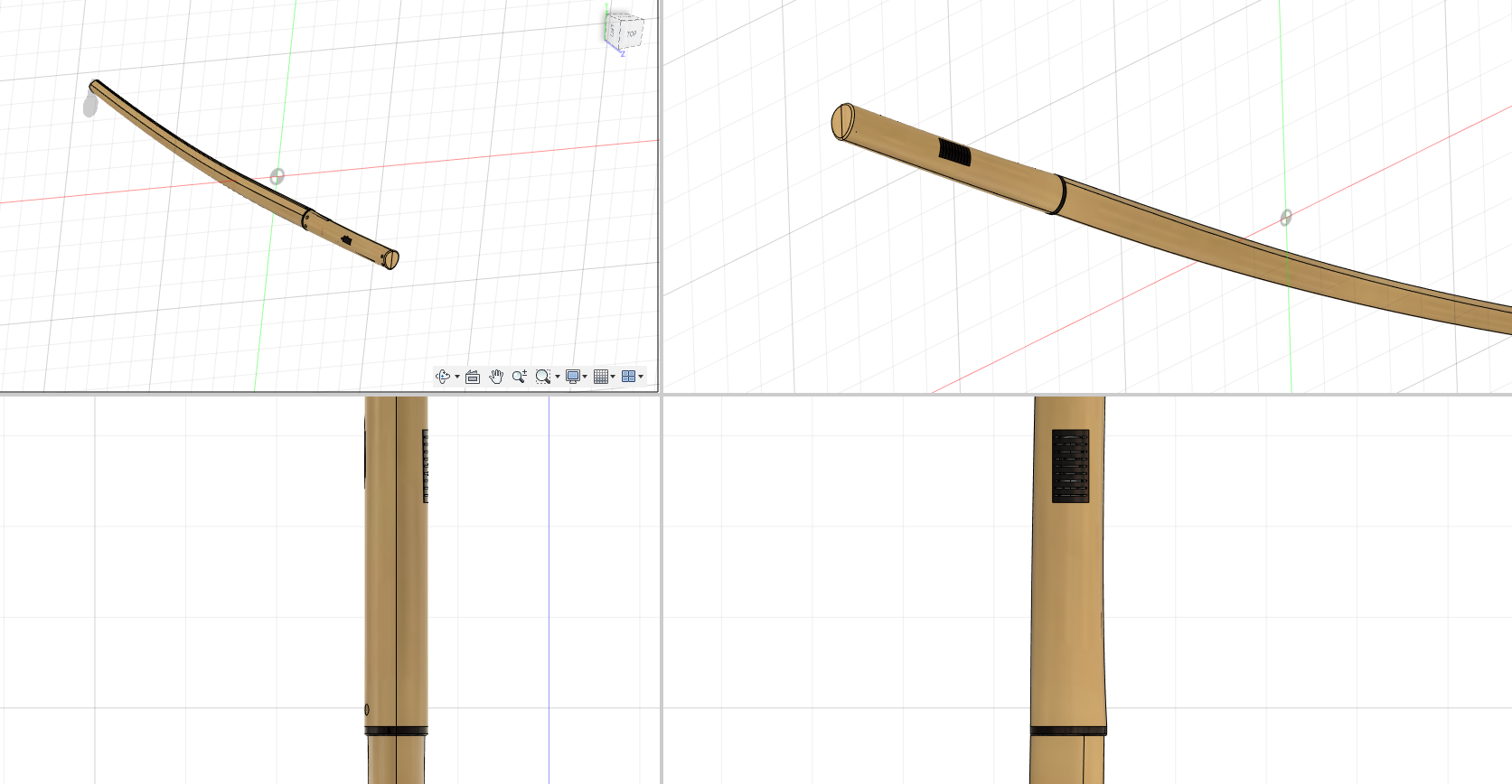
The project is centered on a custom-designed PCB. This sensor-packed board fits inside a practice sword, capturing detailed telemetry—like swing angle and speed—and transmitting it wirelessly.
Highlights



Andere Projekte

{kind=link}
Gefällt dir unsere Arbeit? Wir freuen uns auf deine Nachricht
Addresse
Possingergasse 65
1160 Wien, Österreich